近日,机器人技术领域的顶级国际会议ICRA 2022 (IEEE International Conference on Robotics and Automation) 公布了最终论文录用结果,全球AMR专家极智嘉(Geek+)两篇优质论文成功入选,不仅彰显了极智嘉在AMR领域雄厚的科研底蕴和创新能力,更是对极智嘉构筑稳固创新护城河的再度验证和背书。

此次获选论文中,由极智嘉AI研究院联合华东师范大学和香港中文大学(深圳)发表的论文《Multi-Agent Path Finding with Prioritized Communication Learning》展示了行业前沿的多智能体分布式路径调度算法,以先进的学术成果直击产业应用痛点。
极智嘉机器人算法平台部联合卡耐基梅隆大学(CMU)提出的全新提取对象描述符算法论文也获得了ICRA收录,再次印证了极智嘉在移动机器人视觉和V-SLAM定位导航方面备受学术权威的认可!更值得一提的是,该论文此前已在著名机器人期刊IEEE Robotics and Automation Letters(RA-L)上成功发表。
算法创新工程化升级
高效调度大规模机器人集群
得益于深度神经网络的成功应用,大量基于学习的算法近年来被提出用以解决传统路径规划器无法处理的实时性问题。然而,这些方法为了实现良好的可扩展性,主要采用完全去中心化框架,从而使得算法输出的路径会产生大量的碰撞。受传统路径规划器的启发,极智嘉AI研究院入选论文引入“去中心化路径规划-中心化避障”框架,提出了一种基于通信的多智体深度强化学习算法来求解多智体路径规划问题。
全新多智能体分布式路径调度AI算法经过工程化后大幅度提升了机器人的调度资源利用率,可以支持单仓3000台以上机器人并行智能移动和高效调度。相比于现有技术,在同样调度规模情况下,可以节省服务器成本60%以上,并有效提升调度系统的任务执行流畅性和运行稳定性。
论文内容详解
论文首先提出了一个新颖的数据驱动的优先级学习机制,并将优先级作为通信协议引入到基于通信的多智体深度强化学习中,得到最终的基于“去中心化路径规划-中心化避障”框架的优先通信学习算法 PICO。在大规模稠密障碍物的仿真环境中,PICO 在实时性、可扩展性以及解的最优性上,都大幅超过现有的基于学习的多智体路径规划算法。
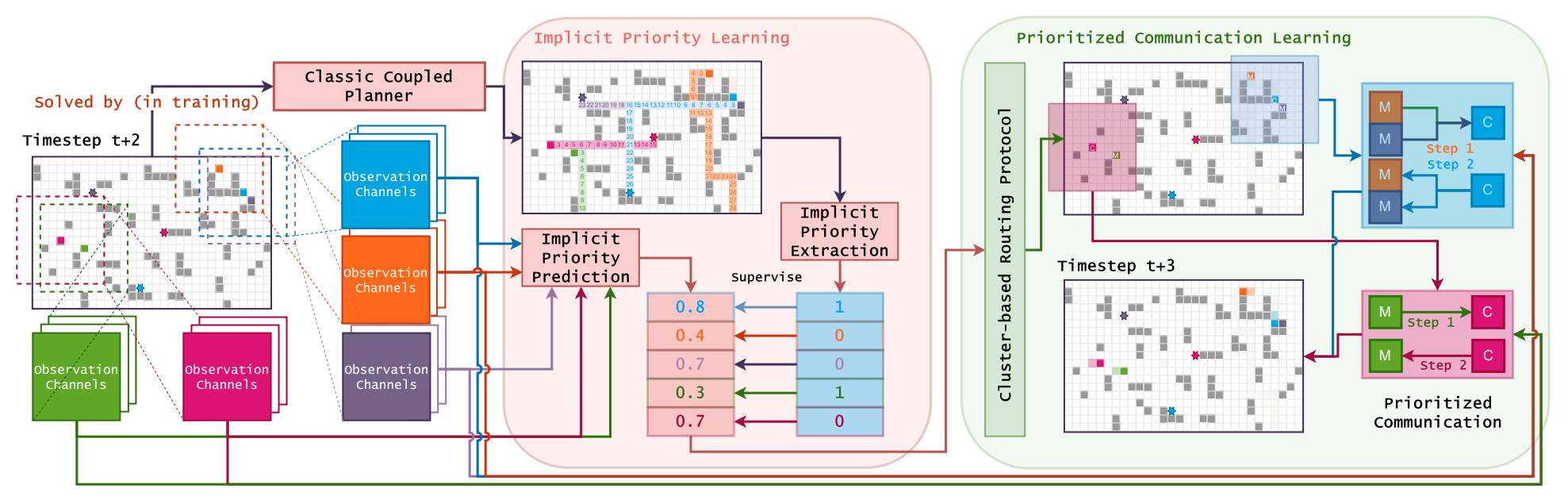
图1 算法流程图
PICO 包含两个交替的学习阶段,即隐式优先级学习阶段和优先通信学习阶段。在隐式优先级学习阶段,PICO通过模仿传统的中心化路径规划器来构建一个替代性的模仿学习任务,来预测每个智能体局部优先级。在优先通信学习阶段,PICO会使用在每个时刻为所有机器人预测的局部优先级来构建整个机器人群体的通信拓扑,通过该拓扑传递基于多智体深度强化学习得到的通信信息,会使得每个机器人获得非对称的全局信息,据此进行决策会使得决策结果基于隐式的动态约束,从而促进所有机器人产生无碰撞的路径规划结果。

图2 优先通信学习过程可视化
论文在大小为20x20,且具有不同智能体数目(8,16,32,64)以及不同障碍物密度(0%,10%,20%,30%)的仿真环境中与现有的基于学习的多智体路径规划算法PRIMAL、DHC以及基于预定义优先级的PICO算法消融版本PICO-Heuristic进行对比实验后,在机器人碰撞次数、障碍物碰撞次数、成功率、路径长度等方面,PICO的表现均大幅超过基准算法。
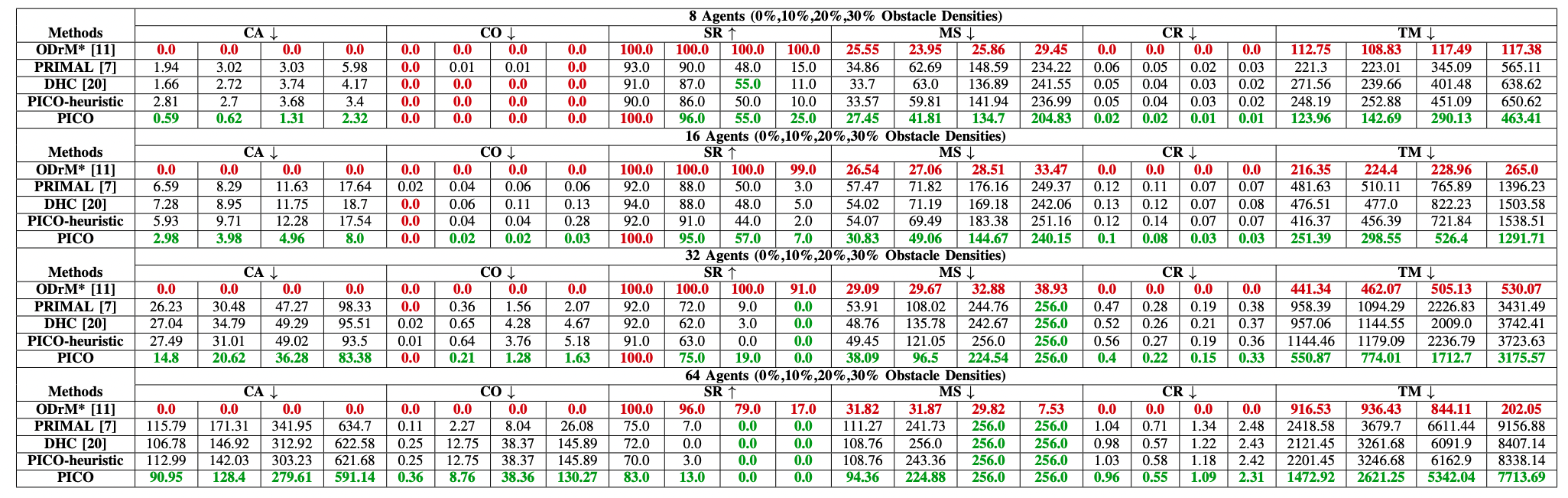
图3 算法性能对比
1. 论文链接:http://arxiv.org/abs/2202.03634
2. 工程代码:https://github.com/mail-ecnu/PICO